 Software > Simulation software > Lunar Simulator deployment
Software > Simulation software > Lunar Simulator deployment
Key highlights
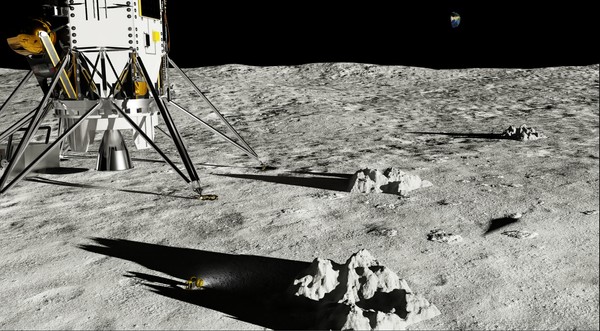
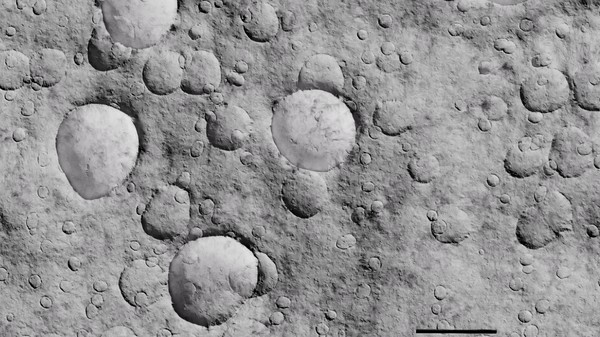
- High-Fidelity Simulation: Physically accurate modeling of lunar terrain, rover dynamics, and environmental conditions.
Collaborative Design Environment: Real-time multi-user interaction for rover operators, engineers, and mission planners. - Scalable Architecture: Modular asset creation and scene composition compatible with Omniverse’s USD-based ecosystem.
- Custom Mission Scenarios: Flexible scripting and visual planning for EVA operations, fault detection, and path optimization.
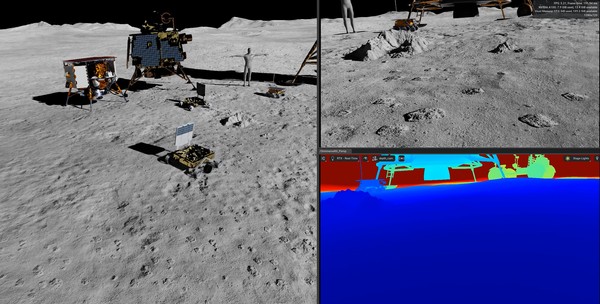
- Sensor & Payload Emulation: Integration of simulated cameras, LiDAR, thermal imagers, and robotic arms for testing payload behaviors.
- Interoperability: Seamless data exchange with ROS, Unreal Engine, and other mission planning tools through Omniverse connectors.
Applications
- Mission Planning & Training: Simulate surface operations for EVA, pathfinding, and fault scenarios to train astronauts, engineers, and control center staff.
- Robotics Development: Test autonomous navigation algorithms, sensor fusion, and robotic arm kinematics in realistic lunar conditions.
- Payload Testing: Evaluate behavior of scientific instruments and data acquisition systems before deployment on actual rovers.
- System Integration & Validation: Conduct end-to-end testing of communication, control, and power subsystems in a virtual lunar environment.
- Collaborative Engineering: Enable interdisciplinary teams to co-design, validate, and iterate rover models and surface scenarios in shared virtual workspaces.
- Education & Outreach: Engage students and the public with interactive lunar exploration content, bridging science and inspiration.
Disclaimer: satsearch is not responsible for any mistakes on this page, although we do our best to ensure correctness. Please report any mistakes to us.
Last updated: 2025-07-30
Lunar Simulator deployment
Export